Как сделать робота манипулятора своими руками

Видео: сборка робота-манипулятора на шасси MeArm на Arduino
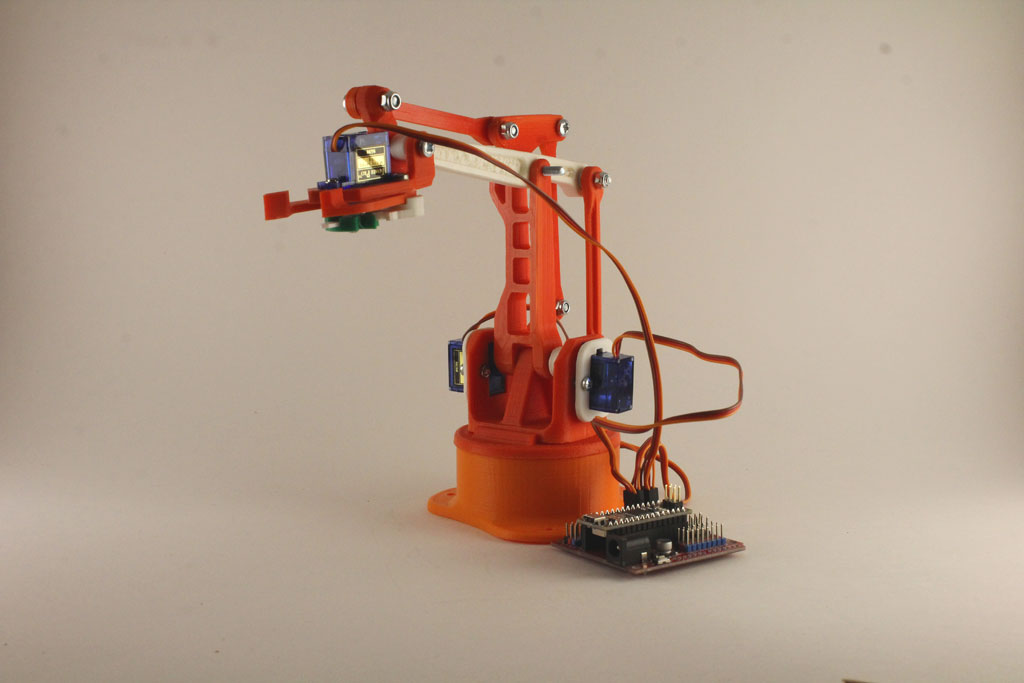
Мы разработали робо-руку, которую любой желающий сможет собрать самостоятельно. В этой статье речь пойдем о том, как собрать механические части нашего манипулятора. Обратите внимание! Это старая статья! Вы можете ознакомиться с ней, если вас интересует история проекта. Актуальная версия здесь.











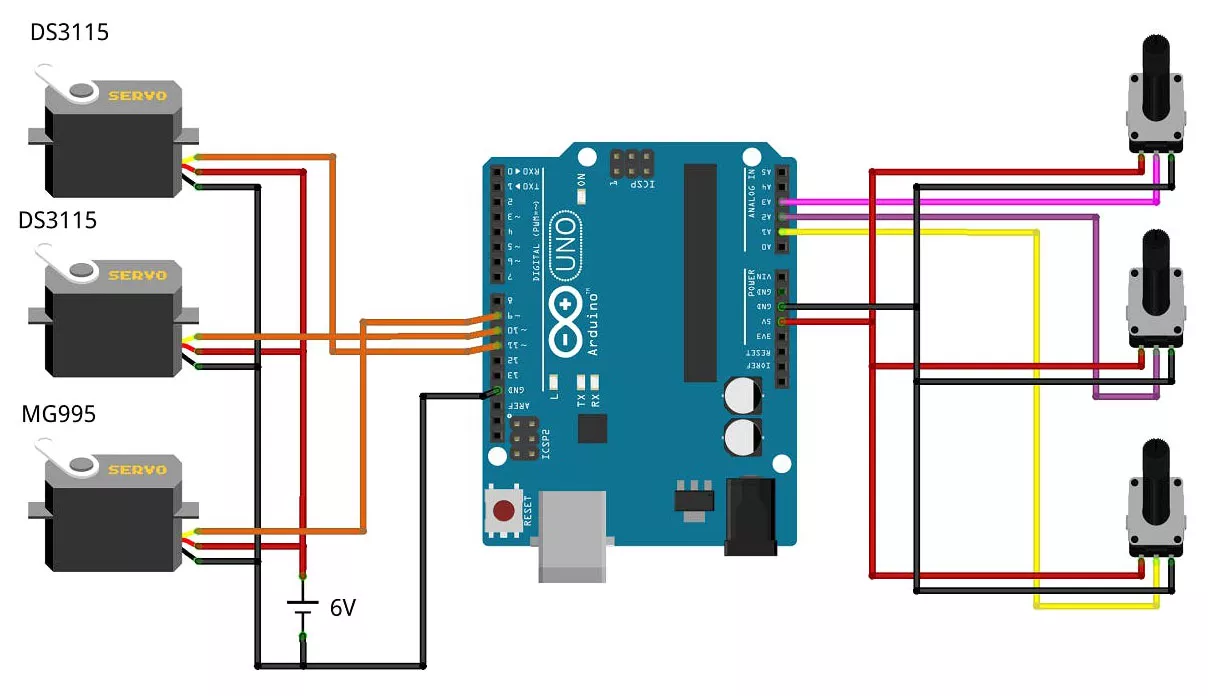
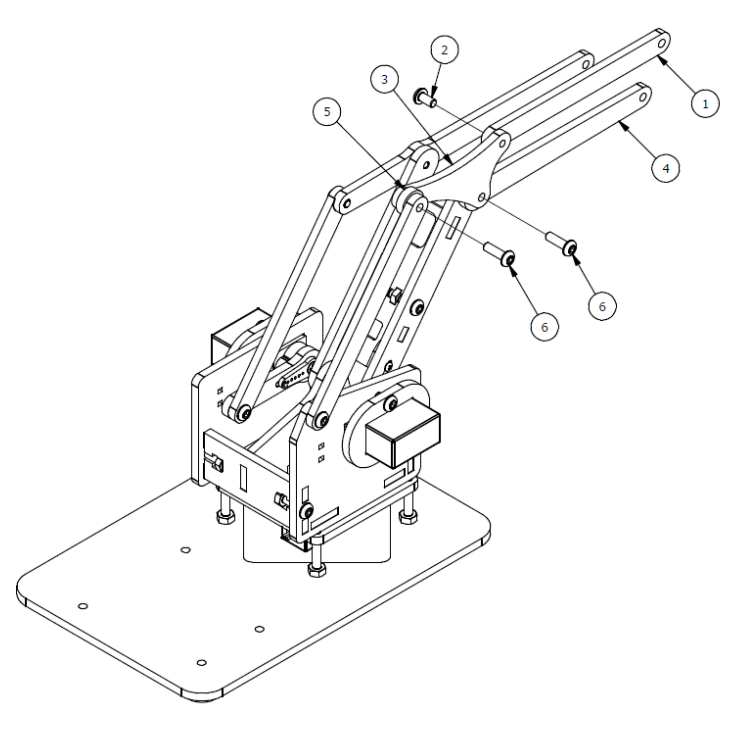
Сегодня в нашем клубе технического творчества стояла задача сборки и программирования робота-манипулятора. После непродолжительных поисков уже существующей конструкции, которой можно воспользоваться, наш выбор упал на открытый проект MeArm. Он включает в себя несколько деталей, соединяющихся по определённой схеме винтиками. В результате получается робот-рука, с приводящими её в движение четырьмя моторами. Мы купили набор на ближайшем радиорынке.







Стараюсь оставлять ссылки только на проверенные крупные магазины, из которых заказываю сам. Также по первые ссылки ведут по возможности на минимальное количество магазинов, чтобы минимально платить за доставку. Если какие-то ссылки не работают, можно поискать аналогичную железку в каталоге Ардуино модулей.